














Die Kuppelsteuerung
Die Kuppelsteuerung mit Netzwerk-Anschluß

Komplette Kuppelsteuerung mit GPS, Netzwerk USB-Server und Funksteuerung.
Die Kuppelsteuerung ist nach einige Änderungen an Soft- und Hardware funktionell erweitert und auf dem neusten, technischen Stand. Integriert ist ein flexibler, kleiner USB-Server (USB 3.0) und die Steuerungsplatine (K8055) für die Hardware der Kuppel.
Ein integrierter USB Hub, ein 16 Kanal Funksender für die Motorsteuerung, div. Schaltrelays und ein integrierter GPS Empfänger mit Zeit-Synchronisation (GPS-Time) für die Encoder gestützte Montierung zwecks genauster Positionierung und Nachführung. Die Abweichungen der synchronisierten Systemzeit von der Realtime beträgt nur wenige Millisekunden.
Zusätzlich hat die Steuerungsbox noch einen USB-Ausgang für Temperatur und Luftfeuchtigkeit (Astroblue, TemPerHym oder UT330B) mit Datenlogger. Ein weiterer Ausgang für das WatchDog Überwachungssignal sorgt bei möglichen Systemabstürzen für die Einleitung des Notbetriebs. Ein Eingang für einen Neigungssensor (Teleskop-Position) für eine Flachdachsteuerung bei Not-Schließung ist ebenfalls vorhanden.
Das Funksystem erleichtert die freie Wahl der Motorsteuerung, z.B. für Schiebetorantriebe einer Flachdachsteuerung oder andere Empfänger für Azimutmotor- und Kuppelspalt-Motorsysteme, ganz beträchtlich. Die Reichweite des 433 Mhz Funksenders ist mit 1000 Metern im Freifeld (433Mhz) spezifiziert und läuft störungsfrei.
Kurzbeschreibung der Kuppelsteuerung
- Anschlußversorgung 12V DC oder GigE
- Anschluß Azimut Sensor mit Encoderrad
- Anschluß Azimut Motor
- Anschluß Kuppelspalt Motor mit Sensorelektronik
- Zusätzliches Funksystem (433MHz) für Azimut- und Kuppelspaltmotor
- Potenzialfreie Schaltausgänge z.B für Licht, Alarm und Watchdog System
- Schalteingang USV Signal und Wolken-/ Regensensor
- Taster (beleuchtet) CW/CCW für Kuppeldrehung (Azimut)
- Taster (beleuchtet) Auf/Zu Kuppelspalt
- erweiterter USB Ausgang für USB Geräte am USB Server
- Gemeinsamer Netzwerk-Anschluß für Prozessorplatine und USB Server
Bei der Umsetzung habe ich auf einfache, bezahlbare Technik geachtet. Mit der Elektronik (Prozessorplatine Velleman K8055) und Mechanik der Kuppelsteuerung nutze ich auch die sehr gute Steuerungs-Software *Dome Control – LesveDome driver* von Pierre de Ponthiere (Belgien). Diese Software läuft auf Personalcomputern mit dem Betriebsystem Win7-11 (32/64 Bit) und ist als zeitbegrenzte Testsoftware oder als Vollversion über eine Lizenz bei Pierre zu erwerben. Der Support ist durch ein Forum und über den Entwickler gewährleistet.
–> Vielen Dank an Pierre für die gute Zusammenarbeit bei der Softwareintegration und technischen Umsetzung!
Hier ist noch einmal die grundlegende Funktion und Historie dieser Kuppelsteuerung beschrieben:
Blockschaltbild und Funktion
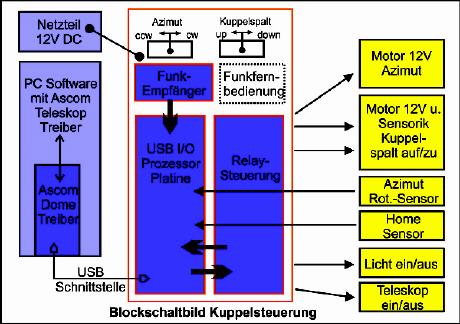
Funktionsschema
Alle wichtigen Grundeinstellungen für den Kuppelbetrieb sind in dieser Software vorhanden. Die technischen Gegebenheiten der Kuppel wie der Durchmesser, die Lage des Teleskops im Kuppelraum, die Eigenschaften des Azimut-Rades und des „Zählbetriebs“ sowie Home- und Endschalter sind im Setup der Software frei konfigurierbar. Die Kuppelsteuerung ist über seine USB-Schnittstelle mit einem USB Netzwerk-Server (GBit) und einem Remote-Steuerungsrechner (PC) mit dem Büro und Arbeitsraum im Wohnhaus verbunden. Der Datenaustausch der Azimutdaten erfolgt direkt zwischen den Ascom Treibern der Teleskopmontierung und dem Ascom-Treiber der Kuppelsteuerungs- Software auf dem Rechner.

Meine erste Lochscheibe des Azimutsensor
Azimutrad Kuppelantrieb
(Alternatives Azimutrad siehe unten)
In diesem Beispiel mit einer 100mm x 3mm
Alu-Lochscheibe (16 Bohrungen) durch zwei Gabellichtschranken die Auswertung der Impulse und Drehrichtung im Graycode auf der Prozessorplatine. Der Umfang des Kuppelkranzes, Durchmesser der Lochscheibe und die Anzahl der Bohrungen der Lochscheibe sind im Setup einstellbar. Als Home-Sensor für die Grundstellung der Kuppel dient ein einfacher Magnetschalter. Das Öffenen und Schließen des Kuppelspalts ist über Endschalter und/oder Zeitintervall wählbar.
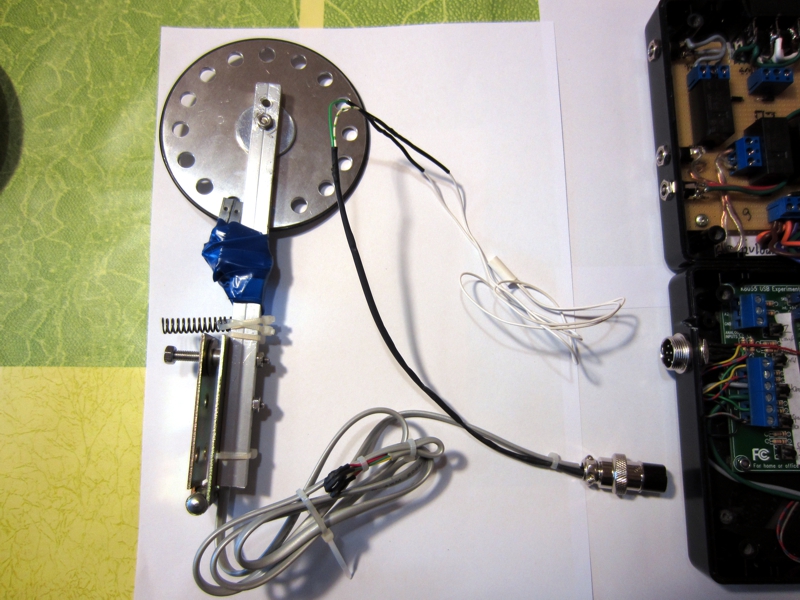
Azimut- und Home-Sensor mit Federarm
Als Planetariumsprogramm kann natürlich jedes Programm wie (z.B. The Sky 6, Cartes du Ciel, Stellarium u.A.) genutzt werden, das über eine Ascom-kompatible Schnittstelle mit der Teleskopmontierung kommuniziert. Die Steuerung erhält dabei die (Azimut)-Daten direkt aus dem Ascom-Treiber der Teleskopmontierung, berechnet die neue Position und stellt den Kuppelspalt immer automatisch vor die Öffnung des Teleskops.
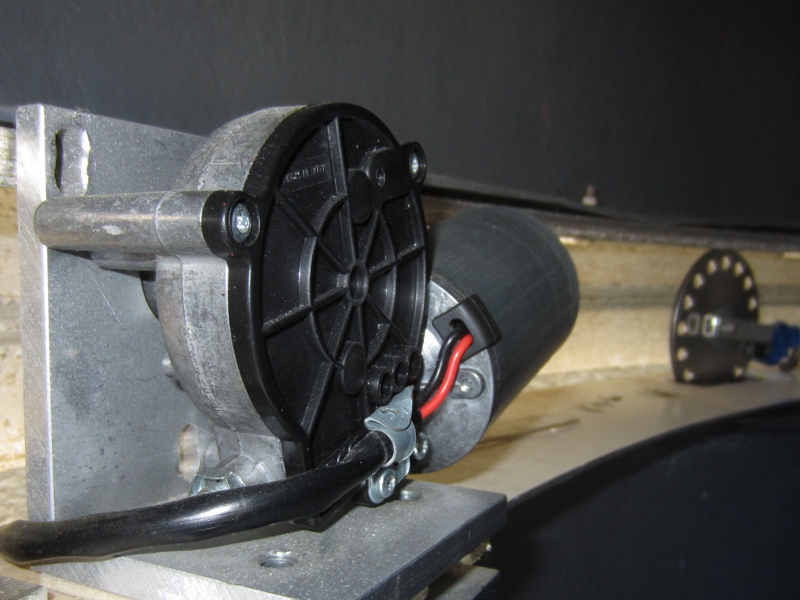
12V DC Motor mit Halterung, im Hintergrund das Laufrad mit dem eingebauten Azimut Sensor
Kuppelantrieb (Motor)
Die Kraftübertragung auf den Kuppelkranz erfolgt über ein 45mm Reibrad (Continental-Rotafrix), das mit einem 12V DC Motor (Doga Do11137632B00/3049) und 6Nm Drehmoment (25U/Min.) angetrieben wird; eine volle Umdrehung der Kuppel erfolgt in ca. 1Min. 19Sec.
Der Motor und das Antriebs-Reibrad gewährleisten einen sehr laufruhigen Betrieb bei ausreichend Antriebsmoment; optional können auch 220V AC-Motoren mit Frequenzwandler genutzt werden. Zusätzlich sind für den kabellosen Handbetrieb (Azimut und Kuppelspalt) je zwei Taster und eine Funk-Fernbedienung vorhanden. Die softwaregesteuerte, automatische Nachführung erleichtert den Kuppelbetrieb natürlich in den kalten Winternächten erheblich.
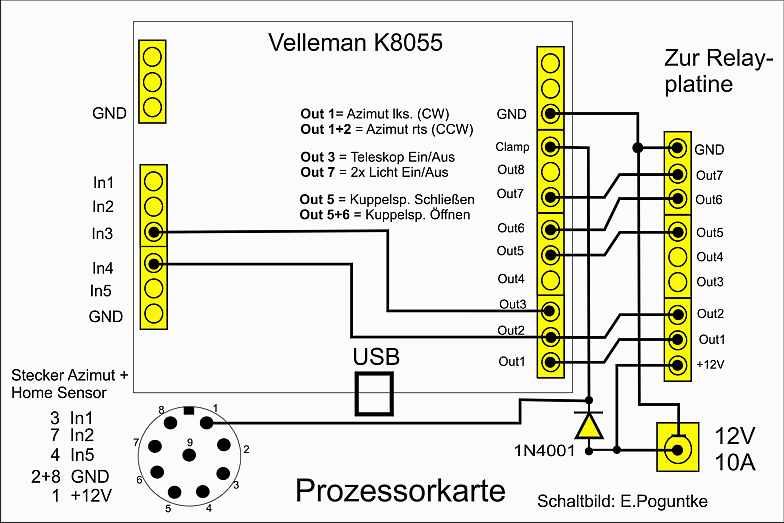
Prozessorplatine (Anschlußplan)
Blockplan (Beschaltung) der alten Prozessorplatine
Die Prozessorplatine ist ein Velleman K8055 Board und kann direkt über die USB Schnittstellen angesprochen werden. Alle weiteren Anschlüsse sind der Beschreibung dieser Schaltungen und des Velleman Boards zu entnehmen.
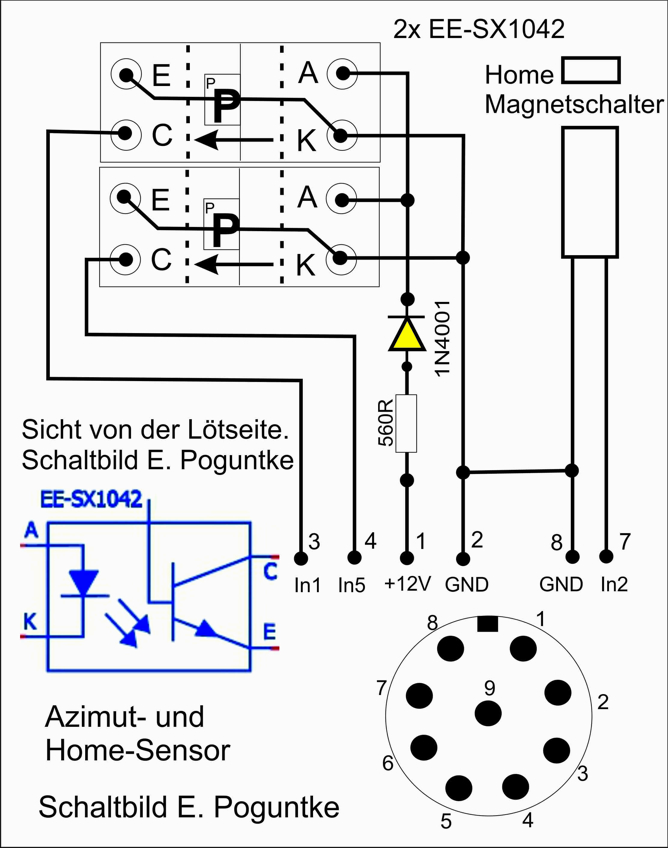
Azimut- und Home- Sensor
Der Azimut- und Homesensor
Schaltbeispiel der Gabellichtschranken des Azimut Sensors mit zwei Omron EE-SX1042. Bei kleinerer Lochscheibe können auch die funktions- und
pinkompatiblen EE-SX1041 (Conrad) genommen werden. Die Auswertung (Drehrichtung und Anzahl) der Impulse erfolgt durch die Rotation der Azimut-Lochscheibe während der Kuppeldrehung. Der Home-Sensor ist ein einfacher Magnetsensor.
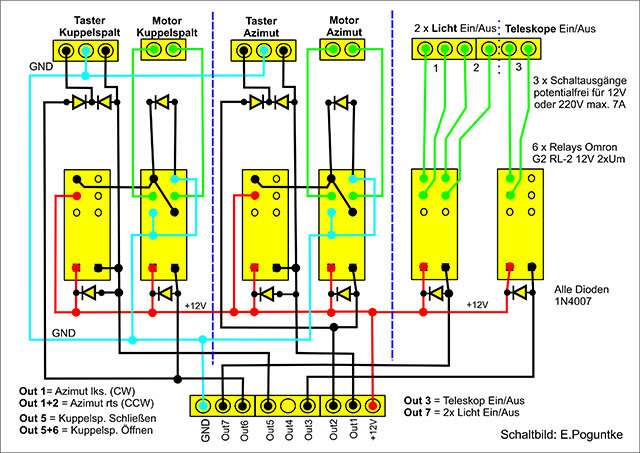
Schaltplan Relaykarte
Einfacher Schaltplan der Relaykarte
Im Bild ist der einfache Schaltplan der Relaykarte zu sehen, wie er für meine Kuppelsteuerung in der ersten Version umgesetzt war. Die Signale (aktiv low) des Controllers sind direkt mit der Anschlußleiste der Relaykarte verbunden. Zusätzlich sind zwei potenzialfreie Schaltausgänge für Licht und das Teleskop vorgesehen, die (bei Bedarf) ebenfalls über die Kuppelsteuerungssoftware geschaltet werden. Diese potentialfreien Ausgänge sind für Verbraucher (12V oder 220V/ max. 7A) ausgelegt. Als einfache Bedienelemente für Kuppeldrehung und Kuppelspalt (auf/zu) sind im Gehäuse zwei zusätzliche Taster (2xUm) vorhanden.
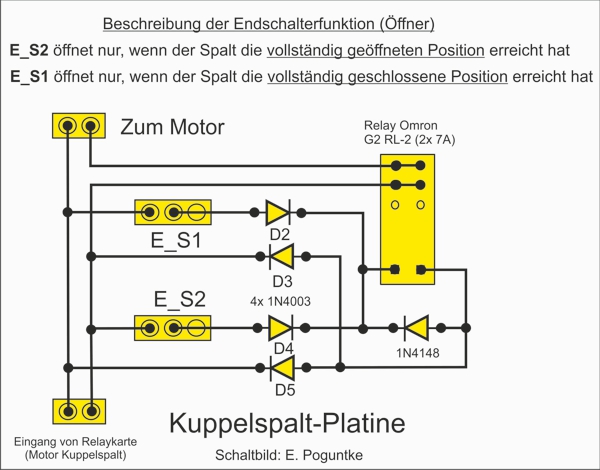
Kuppelspalt Platine
Die Kuppelspalt-Platine
Kommen wir zur ebenfalls sehr einfachen Schaltung der Kuppelspalt-Elektronik. Die benötigte Zeit zum Öffnen und Schließen des Kuppelspalts wird zunächst im Treiber der Lesvedome Software (Ascom) eingestellt. Beim Öffnen oder Schließen legt dabei die Relaykarte (Motor Kuppelspalt) der Basissteuerung die Spannung mit entsprechender Polarität für die Motorwicklung an den Eingang der Kuppelspalt-Platine in dem zuvor eingestellten Zeitraum an.
Über die Endschalter (E_S1/E_S2) des Kuppelspalts wird bei erreichen einer Endposition der Schalter geöffnet und die Versorgungsspannung für den Motor (die Motoren) durch das Relay unterbrochen. Als Endschalter (Öffner) können einfache Kontakt- oder Magnetschalter eingesetzt werden. Die Kontaktierung (Versorgung Motor) zur Platine erfolgt über zwei Schleifkontakte am Kuppelkranz und ist natürlich nur in der festen Park- oder Homeposition der Kuppel möglich. Die Positionen werden ebenfalls im Ascom Treiber festgelegt.
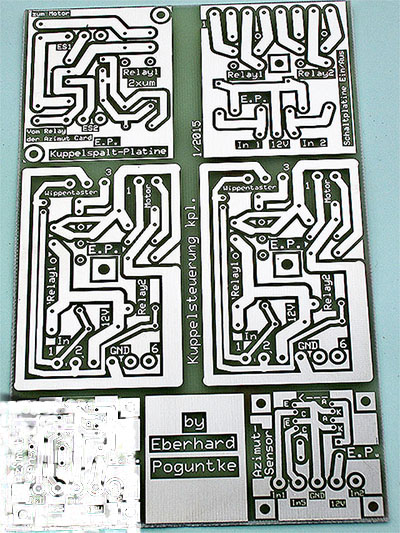
Alter Platinensatz
Der ursprüngliche Platinensatz
Von der Schaltplatine (für Verbraucher), der Motoransteuerung des Azimutantriebs, der Kuppelspaltplatine und der Azimut- Sensorplatine hatte ich einen 1,5mm Platinensatz im Mehrfachnutzen angefertigt.
Neues Azimutrad

Das neue Azimutrad (43mm) mit 6-fach Lochung und Halterung aus dem 3D Drucker (PET-G-Filament) sorgt inzwischen für eine höhere Genauigkeit bei der Abtastung der Kuppelposition. Als Reibradfläche ist ein 38mm O-Ring aufgespannt, ein einfacher Hebelarm mit Federmechanismus gleicht Unebenheiten aus und drückt das Laufrad für die Positionsauswertung gegen den Kuppelkranz.
Die neue 8-fach Switchbox für Geräte
Wie oben erwähnt ist die Steuerung komplett mit Funk-Schalttechnik erweitert. Zusätzlich zu den bereits bestehenden, motorischen Ausgängen gibt es jetzt ein selbstlernendes 433 Mhz Funksystem zur Steuerung der Motoren für die Bewegung von Kuppelspalt und Azimut. Dazu ist die Kuppelspalt- und Azimut- Motorisierung neu gestaltet und mit eigenständigen Funkempfängern versehen. Im aktuellen Automatisierungsprojekt wurde bisher für das Gerätezubehör (Filterrad, Lüfter, Focuser, Flachbild-Flap, Regen- und Wolkensensor u.A.) am Teleskop ein 12V IP-Switch benutzt; der ist jetzt eingemottet. Denn das Kuppel Rotations- und Kuppelspalt- Öffnungssystem ist bereits mit einem K8055N Controller realisiert und wird vollständig mit dem LesveDome ASCOM Treiber gesteuert. Ein recht schönes Merkmal der LesveDome Software ist, dass die GUI dazu einen zweiten K8055 mit ASCOM-Switch-Protokoll unterstützt.
Des Weiteren sind im 2. Controller noch H-Bücken (LMD 18200) eingebaut, die für das motorische Klappen-System zum automatisierten Tubusverschluß und für eine Lüfterregelung von zwei PWM Ausgängen (Analog OUT) gesteuert werden.
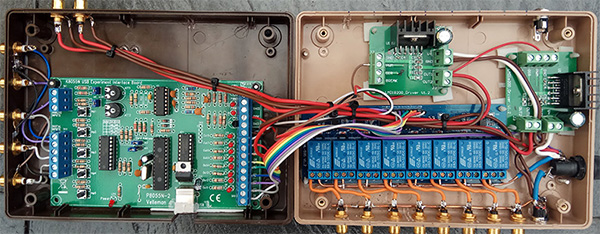
Ausgestattet ist die Switchbox mit acht Relayausgängen für 12V Verbraucher und zwei schaltungstechnisch angepassten PWM Regler-Moduln (LMD18200) für Lüfter oder Taukappenheizungen bis 3A je Kanal.
Das netzseitige Einschalten der gesamten Versorgung der Kuppel und der Netzteile (12V/24V) übernimmt eine Schaltleiste mit Homematic-System und liefert 24/7 die aktuelle Luftfeuchtigkeit und Temperatur in der Sternwarte.